无
”双目相机的标定 python“ 的搜索结果
在双目视觉中,标定摄像机是一个非常重要的步骤。本文将展示如何用Python和OpenCV对双目相机进行标定。
采用张正友相机标定的方法,通过对黑白棋盘格角点计算相机内外参数,传入所有图片各自角点的三维、二维坐标,相机标定。使用cv2.calibrateCamera()这个函数。它返回相机矩阵、畸变系数、旋转和平移向量等。
Python实现的自标定系统 copyright@Eason Requirements python-opencv 3.14 numpy os sys 基本流程 Created with Raphaël 2.2.0Load DatasetEstimate Fundamental matrixGet essential matrixGet camera matrix[R...
在Python中,可以使用OpenCV库来进行双目相机标定。 下面是一个使用OpenCV进行双目相机标定的示例代码: ```python import numpy as np import cv2 # 定义棋盘格的行列数 rows = 9 cols = 6 # 创建棋盘格角点的...
双目摄像头标定拍照源码
标签: 摄像头标定
该代码利用opencv3.2+Python3.5实现了双摄像头视频实时显示与拼接——方便双摄像头的安装调试,还实现了当按下键盘K键时左右摄像头同时拍照并保存。
双目相机标定可以使用OpenCV库中的函数进行实现。具体步骤如下: 1. 拍摄一组双目图像,保证左右相机视角有一定重叠区域。 2. 提取每张图像中的角点,可以使用OpenCV中的findChessboardCorners函数。 3. 对每张图像...

在Python中使用OpenCV进行双目相机标定,可以通过以下步骤实现: 1. 准备标定板:使用一个已知尺寸的标定板,如棋盘格,打印出来并粘贴在平面表面上。 2. 拍摄标定图像:使用双目相机拍摄多张标定图像,保证标定板...
以下是使用Python进行双目相机标定的示例代码: ```python import numpy as np import cv2 # 定义标定板的参数 board_size = (9, 6) square_size = 0.025 # 棋盘格方块尺寸,单位为米 # 设置标定板上角点的坐标 ...
前言:基于Python版本的相机校正,并且校正结果与官方对比主要差值较小。话不多说,直接上代码。 1.导入库 包括opencv, numpy和文件操作库os import cv2 import numpy as np import os 2.编写函数 本次主要有...
由于本人水平有限,以下单双目代码是我自己花时间搜集、整理并加以修改的单双目标定的python代码,希望能帮到和我一样半路出家的只会python的小白。 文中标定过程中用到的相关函数在我另外一篇博客里都有...
Date:2020-10-26作者:Tom Hardy来源:公众号【3D视觉工坊】本文汇总了常见的一些单传感器、多传感器的标定融合paper、工程代码,应用于自动驾驶、3D视觉、SLAM等领域,供大家学习参考~1、相机标定Online ...
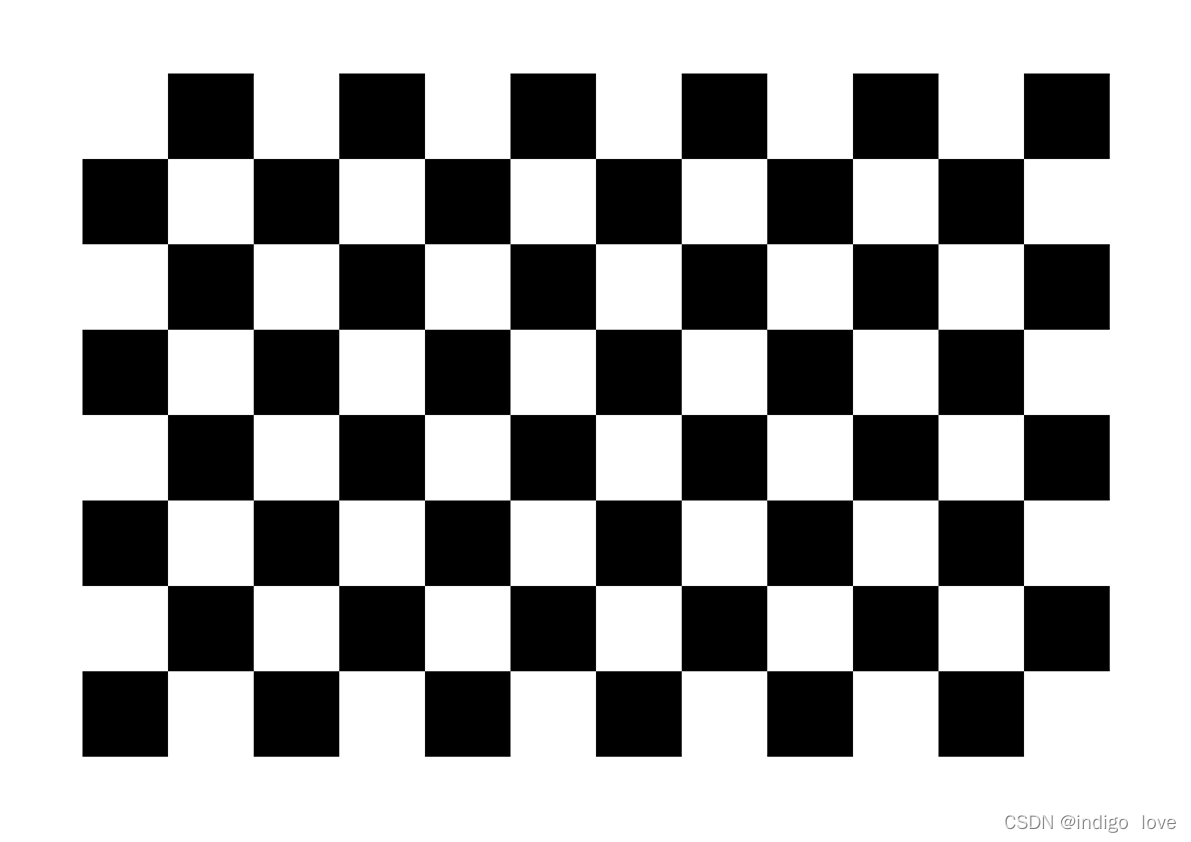
一、制作标定板将下图打印:图一将打印出的纸固定放到一个平板上,使用同一相机从不同的位置,不同的角度,拍摄标定板的多张照片(10-20张最佳),将照片放到文件夹中:二、提取标定板的世界坐标需要注意标定板的...
张正友标定法利用如下图所示的棋盘格标定板,在得到一张标定板的图像之后,可以利用相应的图像检测算法得到每一个角点的像素坐标 (u,v)。张正友标定法将世界坐标系固定于棋盘格上,则棋盘格上任一点的物理坐标 W=0,...
在“Camera-centric”中查看相机与图片的空间位置是否与你实际拍摄时候的位置差不多,因为当误差太大的时候,这里的左相机、右相机、图片三者之间的位置关系真的很离谱!镜头的畸变从图像中心径向增加,并且有时在...

立体匹配是计算机视觉中的一个重要领域,旨在将从不同角度拍摄的图像匹配起来,以创建类似人类视觉的3D效果。...下面的代码实现了从相机标定到立体匹配的完整流程,下面将分别介绍各个函数的参数和输出。
使用Ros打开双目相机,并添加时间戳,实时运行VINS-Fusion和ORB_SLAM2。
双目相机的标定可以使用Python中的OpenCV库来实现。具体步骤如下: 1.采集双目图像,保证左右相机的视野重叠。 2.对采集到的图像进行角点检测,...print("双目相机标定完成,平均重投影误差为:", mean_error) ```
6、运行标定程序(程序中跑动的是包中的标定的py程序) 注:size为网格数,square为网网格边长,right/left都为发布的图像话题(在rviz或rostopic list中查看话题)2、修改CMakeLists.txt(cmakelist里要包含到...


也许你还会看到相机外参数有这样表示的:这种表示方法是Rodrigue旋转向量的形式。参考了https://blog.csdn.net/hongbin_xu/article/details/78929006为什么w的模等于v⊥的模呢?这是因为外积有一个性质就是外积的...

Matlab 单双目相机标定+畸变校正2019年1月14日 2019年1月19日Matlab 单双目相机标定+畸变校正不管单目双目标定第1第2步都是必须的第3步为单目标定,第4步为双目标定1. 标定板您使用的棋盘图案不得为方形。一侧必须...
推荐文章
- 小说网站系统源码|PHP付费小说网站源码带app-程序员宅基地
- Swift编码规范_swift 正则判断文件类型-程序员宅基地
- 关于shell 中return用法解释(转)_shell return-程序员宅基地
- Linux编译宏BUILD_BUG_ON_ZERO-程序员宅基地
- c51语言单片机打铃系统设计,基于单片机的自动打铃系统的设计-程序员宅基地
- 在php中使用SMTP通过密抄批量发送邮件-程序员宅基地
- python数据清洗+数据可视化_python课程题目数据清除与可视化-程序员宅基地
- 【11g】3.3 Oracle自动存储管理存储配置_oraclestorageoptions-程序员宅基地
- signature=b2f9171fa2897cefe08a669efaf58433,FULFILLMENT TRACKING IN ASSET-DRIVEN WORKFLOW MODELING-程序员宅基地
- 宜兴市计算机中等学校,重磅!江苏省陶都中等专业学校正式揭牌!-程序员宅基地